2017年9月28日,机器人大讲堂邀请北京航空航天大学杰出青年学者文力老师为大家带来软体机器人的研究报告。这位年轻有为的北航副教授,刚刚在《Science Robotics》上发表了软体机器人的封面文章,在中国的机器人圈引起了不小的轰动。
此次文力老师在大讲堂的分享汇报吸引了不少学校学生以及产业界的同仁广泛关注,为方便大家学习,现将文力老师的报告内容整理如下:
什么是软体机器人
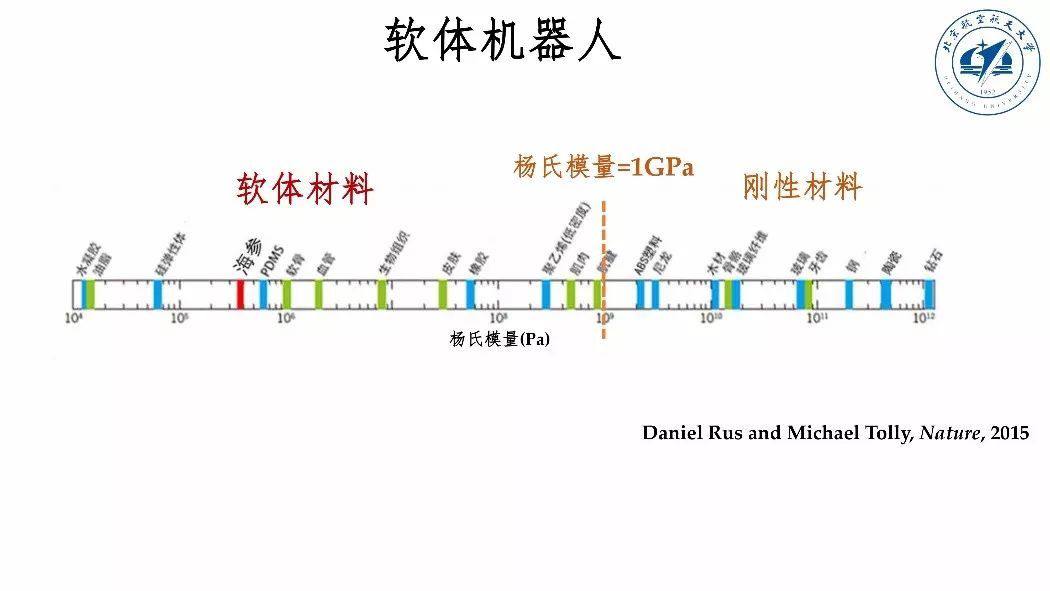
首先我们看一下软体机器人的定义,什么是软体机器人?简单来讲,就是大部分的材料,如果把材料按照一个频谱从左到右进行一字排开的话,处于这个频谱右端的材料是刚性材料,硬如像钻石是最硬的一类材料;到左边像水凝胶或者像我们人类的脂肪是软性材料。它们的硬度差了大概10的9次方之多。
中间有一条线,杨氏模量是1GPa,1GPa是什么概念呢?就是相当于我们的肌腱,比ABS塑料还要再软一点,比我们肌腱要再硬一点。这条线把所有的材料频谱分成左右两边。靠刚性的那一端主要是组成了传统的刚性机器人的核心部件,比如说铰链、减速器,比如电动机、螺钉等等。
而处在这个材料频谱的左端的,比如像硅胶、血管、人体的皮肤、橡胶等等,这些都是软体材料。如果大部分机器人的机械部件或者核心部件是由软体材料组成的,我们就可以把它称之为软体机器人。这个定义是由Daniela Rus,麻省理工人工智能实验室的主任画的这一张图,这个图也成了软体机器人的一个基本的定义。
软体机器人是怎样产生的

我们看一下这个软体机器人到底是什么时候产生、怎么产生,以及它总体的一个发展趋势是什么样的。从这个图上来看,2011年的时候,由George M.哈佛大学的老先生,他最早在美国国家科学院刊上面发表了一篇文章,隔年又在《科学》杂志发表了一篇文章,他讲到用硅胶材料做出了一个能够爬行的四足动物,但是它只有一种材料。
随着研究的快速发展,逐步地到了向多材料发展,就是上边最右边这个图,通过3D打印从单一材料到多材料的过渡。右下角这个图是人们逐步把智能液态的响应材料加入到了硅胶材料当中,让它能够对外部的应力。就是当它拉它、卷它的时候,它的内部的液体会产生一部分的变化,比如光强以及传感的输出会发生变化,这样就为软体机器人加入了一定的智能。
再到下面中间这张图是去年在《自然》杂志上面发表了一篇很有名的文章,用液体化的3D打印,把所有的驱动、传感、甚至控制器都打印到了一个小小的章鱼上面,可以通过柔性的,像逻辑控制器FPGA来控制章鱼的八个触手,产生有规律的、节律的运动。
右下角这个图是科研人员将培养的小鼠细胞对它进行了一个基因编程,让这种小鼠细胞对外部的光强能够产生反应。当他把小鼠的细胞平铺到一个黄金材料上的时候,就可以做成一条鱼;这条鱼在外部光强的响应下会产生波动。
所以从2011年到2017年,这七年的时间内,软体机器人从单一的材料过渡到了多材料,再到了智能材料,最后有可能到生物材料,这是一个发展的趋势。所以从这个趋势结合起来讲,未来的发展方向一定是它结合驱动、传感、变刚度、多功能的复合材料,以及添加软体机器人的控制方法。目前控制方法这一块是比较欠缺的,这是一个学术或者是创新方面的一个主要的发展趋势。
软体机器人用来干什么

那么这个软体机器人用于干什么?首先第一个是用于抓持作业,这个抓持作业就如这个图上所看到的,左边这个蓝色的球状是康奈尔做出的样机;中间的这个是气动软体抓持器,左下角的是费斯托做出的一个仿生的抓持器。这一类所有的软体机器人是用于抓持作业,抓持作业就是相当于物品分解或者是抓持形状不一、大小不等的物体时发挥它的优势。
在座的有很多同学,有很多是博士生,你们要发论文,产业界也可以看一些这样的论文,来引导产业的方向。软体机器人的发展是非常快的,是当今机器人领域里面最重要、最前沿的一个方向,主要是从两个方面,就是基本的《Nature》和《Science》杂志的论文,2012年到2017年发表的论文数远远超过了前十年或者前几十年的论文数量,今年可能是10篇左右都是关于软体机器人的。而软体机器人还专门成立了一个杂志,就叫《软体机器人》,它的影响力也是机器人里面排名第一位的,所以说这是未来的一个前沿的方向。
同学们可能比较关注这个问题,为什么软体机器人能产生这么多有影响力或者说是比较原创的工作呢?我总结了一下,就是它源于几个重要的因素。第一个方面,就是由于以3D打印、智能材料为主的这一批交叉学科,加入到了机器人这个行业当中,所以一下让机器人这个行业不再只是工程师或者机械、或者自动化这两个领域的人,而加入了像生物、材料、3D打印等这些比较热点的研究问题上,所以让它从一个单一的学科变成了一个多学科交叉。所以利用3D打印、软体机器人,还可以探索一系列新的科学问题,或者说未来包括国防或者其他的应用。
文力老师相应的科研成果

所以我们脑子里浮现出三个主要的问题,一个是这个吸盘关键的形态特征是什么?第二个是从机器人的角度怎么样加工制造,以及驱动控制一个仿生鮣鱼的吸盘?第三个是这个鮣鱼吸盘蕴含的科学发现是什么?所以带着这些问题,我们用Micro nano CT扫描了一个死去的鮣鱼的头部,可以看到这个鮣鱼的结构非常奇特,有不同尺度,从微尺度到宏观尺度,由硬质材料、软材料组成的。
鮣鱼头部的骨质结构和柔性结构是相互嵌入在一起的,这个问题就对加工提出了非常大的挑战。但是我们在加工之前还是要搞清楚它的特征什么,这是用Micro CT三维重建出来的一个三维的模型,可以看到它有一排一排的结构,我们叫鳍片,在鳍片上面有这种非常微小的齿状的三维结构,像圆锥一样的结构,每一个圆锥根部是200个微米,高度是在500个微米。这种锥状的结构,长在这种鳍片上,而整个这个鳍片还可以在肌肉的驱动下产生这种微微的运动。
这种运动到底会对整个的造成什么样的影响,我们首先测量了一下活体的鮣鱼,它的微动是什么情况。可以看到它可以抬起,也可以落下,而这个抬起、落下的动作是我们通过高速相机很多次实验捕获出来的,整个的幅度大概在150个微米大小。但是这150个微米大小虽然量非常小,但是却起到了很重要的作用。
我们怎么样在机器上面实现这样的运动?我们通过这种直线的、软体的驱动器,一加这种气压就会发生运动,会产生一个直线的运动。这个直线的运动进而通过3D打印的机构,转化成一个转动方面的影响,也是一个仿真的图。

通过这样一个机构,我们在思考,如何将它整个的吸盘给做出来。我们目前采用的方式利用的是多材料的3D打印的方式,不同的颜色代表的是不同的硬度,从最软到最硬,跨度大概是10的4次方,差了10000倍以上。我们相当于是在CT里面把多材料提前设置成这个样子,然后进行一体化打印。
刚才我们讲到了这种小刺的结构,是无法用3D打印一体化打印出来的,它需要用到高精密的激光切割的方式,所以可以看到上面是生物的结构,下面是仿生的结构,它们从尺度大小、锥度等等,都是非常近似的。

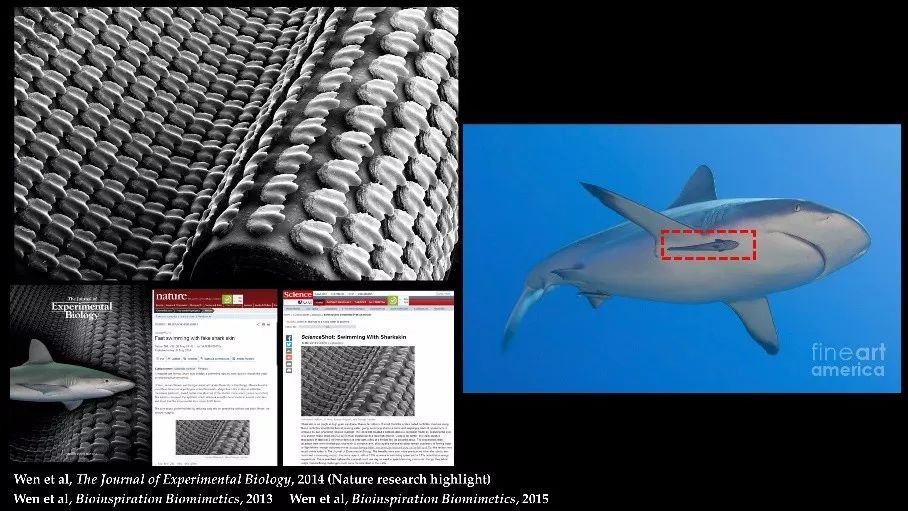
我们为了探索这个科学问题,做了多个不同材料、不同结构的实验样机,然后在一个实验平台上对它进行测量。测量的基底包括光滑、粗糙,20个微米,也包括更粗糙的200个微米,还有鲨鱼皮的表面,不同的表面上面我们希望获得不同的力的结果。
最后实验结果发现,在200个微米的时候,可能能达到60倍的自身的拉力;而到了光滑的表面上,吸附力可以达到340倍。所以说从硬度上来讲,能够产生比较大的吸附力以及切向摩擦力,对未来的应用会有很大的帮助。
我们当时做了一个比较简单的机器人,这个机器人能够流向表面,紧紧地贴在这个表面上面,即使在外部干扰的情况下也不会脱落,除非它自己想要脱落,可以在鲨鱼皮上实现一个比较稳定的吸附。可以想像利用这样一个软体的多材料的吸盘,可以让未来的水下机器人有更多的可能性。相关的研究也是前一段时间发表在《科学机器人杂志》的封面上,同时也获得了包括《科学》和《麻省理工科技评论》这样的一些报道。
鮣鱼是可以吸附的一个东西,主要是靠它的吸盘;但是有没有既有吸附,又有抓持的生物?我们去自然界中去寻找答案。答案就是章鱼,章鱼可以伸出自己的手臂,抓持一个目标物体,也可以抓持像鲨鱼这样比较大型的物体,或者像螃蟹这样一个比较微小的物体,都可以实现抓持。

从这样的一个东西上面获得灵感,我们从2015年10月开始,我们和德国费斯托完成一个合作的项目,就是制作一个仿章鱼触手的软体的机器人的样机。从这个动态的视频蓝色的部分是我们做出来的东西,灰色的部分是基于费斯托早先的仿生大象鼻子的技术进行了一个修改,可以看到它可以抓持这种圆形的或者球形的物体,也可以实现抓持一杯水,然后把它倒在一个杯子里,整个的速度还是可以做到比较快的。
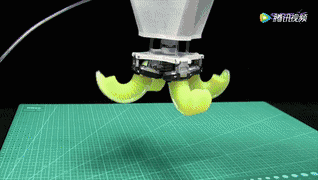
基于这个想法,就是软体的章鱼触手实际上是一种仿生,直接模仿自然。但是它在抓持上面是不是最优的,这是一个问号。所以说我们实验室的人员在测试了不同的材料,也测试了不同的形状之后,产生了另外一种抓持器,这种抓持器从实用性上来讲更好,这是2015年4月份做出来的样机,它可以安全地抓持鸡蛋,抓持一只螃蟹。